The entire purpose of a low range transfer cases is for throttle control/resolution. No 4wd car in the last 30 years does not have enough torque.Having enough torque is not a concern. Electric motors (especially the type used in EVs) produce peak torque at very low rpms.
But when going off-road on terrain that is rough enough to require 'creepy-crawly' speed, there is an often-overlooked problem with not having low range gearing. The motor's efficiency is significantly reduced at such low speeds.
On a normal road, even if the GVW/GCW is maxed out, this isn't a problem because the vehicle accelerates past that very low speed in seconds. But if the terrain itself forces sustained on & off 'creepy-crawly' speed - especially if pulling a heavy load up a long hill - the motor efficiency is going to be significantly worse than normal. This will result in more energy being wasted as heat (possibly stressing the cooling system, which also won't have much airflow), and greater range reduction.
Although a motor's windings can be designed to favor low rpms, and the motor diameter can be increased* to provide higher linear speed relative to the stator, both of those only help a little, certainly nothing like having an extra 3:1 gear reduction for low-speed off-road work.
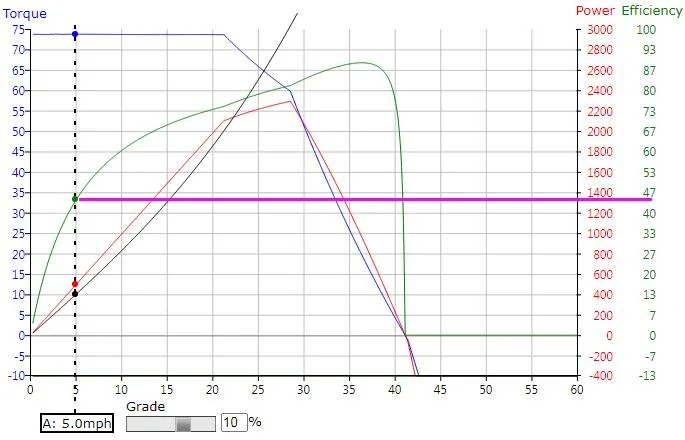
The attached image shows torque, power & efficiency curves for a very efficient brushless 3-phase e-bike motor (EV motors will have higher peak efficiency, but their efficiency curves are similar). Full torque (blue line) is available at very low rpms. But at at 5mph up a 10% grade, efficiency (green line) is about half compared to the peak efficiency range.

Precise throttle control is needed almost entirely for obstacles, ascending, and descending…basically “rock crawling”
What’s really important here is how the motors function at 1-2mph. How they respond to throttle inputs from a rest to 1mph.
It’s possible that the high resolution traction control often found in EV’s could mitigate the need for throttle control.
I can say that throttle control while EV offroading in my rubicon 4xe was pretty bad in comparison to gas. Not sure how relatable that is considering the 4xe runs the electric motor through the traditional gas powertrain. (The EV motor replaces the torque converter, beyond that is a zf8 and a low range transfer case)
I will also say, that electric offroading does not get enough praise. Silent offroading is way better than you might expect.
I really wish the scout would focus on allowing the doors to come off. As far as automotive experiences go, silent offroading with the doors off is on par with tracking a 992 911.
What they probably don’t understand is that the wrangler cannot exist as a full EV. The wrangler is built on a design that is supposed to be familiar. All that familiarity is ruined by the efficiencies required for EV. It would need a full redesign and it would have to look totally different. The wrangler loyalist, which I’m guessing is north of 50% of their sales, would bail due to the changes. My wrangler got 1.3 miles per kWh for reference. It’s a bit different s
I think scout needs to capitalize on the doors off experience. There is no other vehicle that can do EV offroading with a solid axle. I doubt they can do that at this stage as it requires that all speakers and electronic controls except the lock button be moved off the door. It also requires some level of weather proofing on the interior.
Not sure I agree with scouts decision to use k03’s…..it’s a nice tire for sure on gas powered vehicles. Unlike gas powered vehicles, EV’s should be thought of as net zero transportation and you work off the losses to increase range and reduce battery size and weight. This is fundamentally how mainstream EV’s are possible in the first place. The first tesla model S was definitely designed with that intent. You use energy to accelerate and you recapture it during decel. Your range is dictated by the losses during and between those actions. You want to mitigate as many energy losses as possible while you are rolling, hence why EV’s can’t tow anything far (but nobody ever tests urban towing which they would dominate ICE at because that is all about energy used to accel and decel)
Anyway, I hope scout spends significant time managing ultra low speed offroading. You have two types of offroading, the kind that tries to get you from point A to B no matter what’s in the way (wrangler) and the kind that lets you drive fast over anything (raptor) The only reason to have a solid axle offroader is for the first style, which allows articulation.


